
Picture taken in Matterhorn
I am a CS PhD student at the Empirical Inference department of Max Planck Institute for Intelligent Systems and ETH Zurich, supervised by Prof. Bernhard Schölkopf, working on robotics.
I obtained my master's degree in Electrical Engineering and Information Technology at ETH Zurich. I also spent time at Microsoft Mixed Reality & AI Lab in Zurich, Tencent AI Lab and Tencent Robotics X Lab.
Outside of academics, my hobbies include music, photography, doing various kinds of sports, and playing League of Legends and StarCraft II.
Research
 Safe & Accurate at Speed with Tendons: A Robot Arm for Exploring Dynamic Motion
Safe & Accurate at Speed with Tendons: A Robot Arm for Exploring Dynamic Motion
Simon Guist,
Jan Schneider,
Hao Ma,
Le Chen,
Vincent Berenz,
Julian Martus,
Heiko Ott,
Felix Grüninger,
Michael Muehlebach,
Jonathan Fiene,
Bernhard Schölkopf,
Dieter Büchler
Robotics: Science and Systems (RSS), 2024
coming soon...
Quankai Gao,
Qiangeng Xu,
Zhe Cao,
Ben Mildenhall,
Wenchao Ma,
Le Chen,
Danhang Tang,
Ulrich Neumann
Preprint, 2024.
arxiv •
website •
code
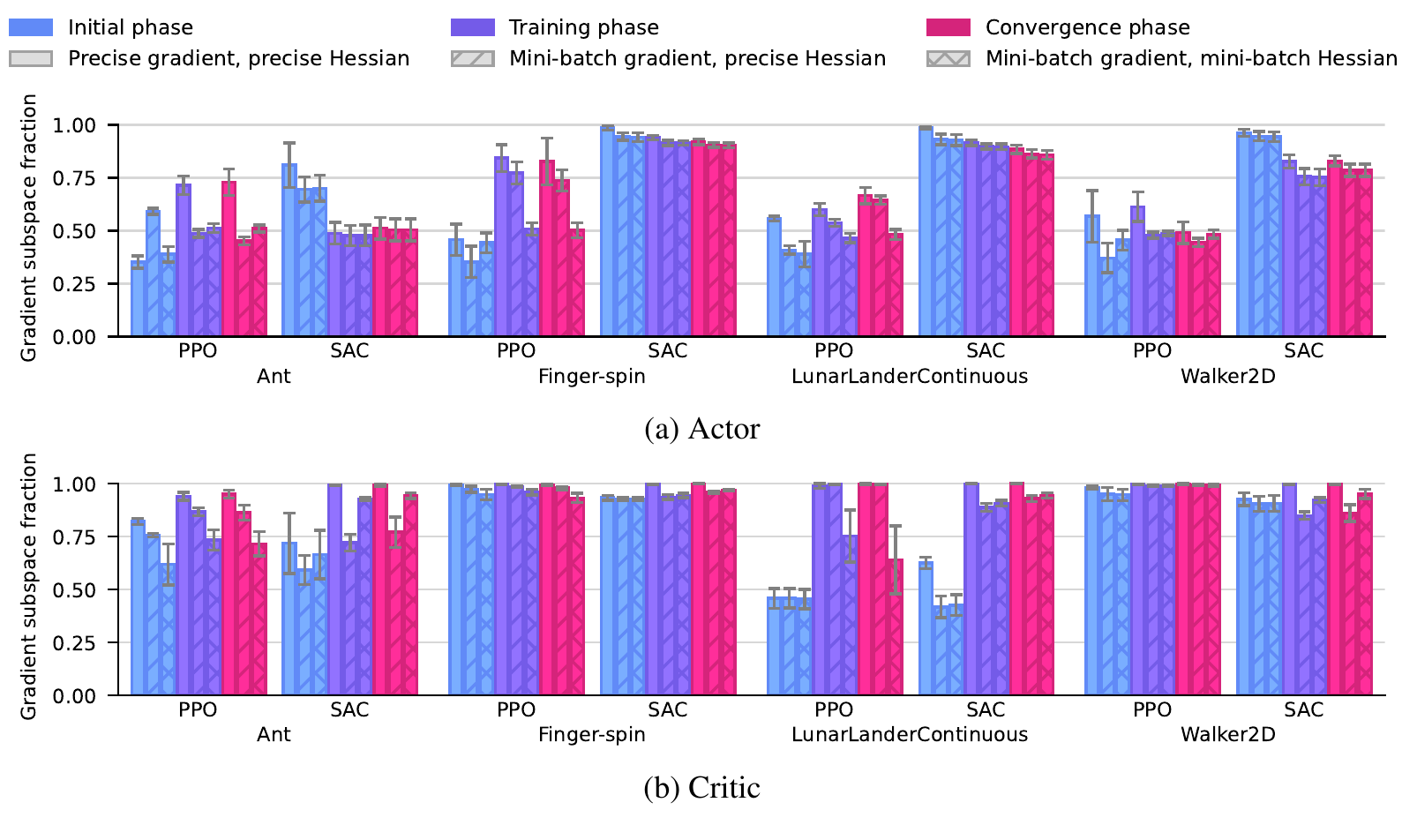 Identifying Policy Gradient Subspaces
Identifying Policy Gradient Subspaces
Jan Schneider,
Pierre Schumacher,
Simon Guist,
Le Chen,
Daniel Haeufle,
Bernhard Schölkopf,
Dieter Büchler
International Conference on Learning Representations (ICLR), 2024
arxiv •
website •
code
Weirong Chen,
Le Chen,
Rui Wang,
Marc Pollefeys
IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), 2024
arxiv •
website
Le Chen,
Weirong Chen,
Rui Wang,
Marc Pollefeys
IEEE International Conference on Robotics and Automation (ICRA), 2024
arxiv •
supp video
Soomin Lee*,
Le Chen*,
Jiahao Wang,
Alexander Liniger,
Suryansh Kumar,
Fisher Yu
IEEE Robotics and Automation Letters (RA-L), 2022
IEEE International Conference on Robotics and Automation (ICRA), 2023
(*: equal contribution)
arxiv •
website •
supp video •
bibtex
Yunke Ao*,
Le Chen*,
Florian Tschopp,
Michel Breyer,
Andrei Cramariuc,
Roland Siegwart
IEEE International Conference on Robotics and Automation (ICRA), 2022
(*: equal contribution)
arxiv •
poster •
supp video •
code •
bibtex
Le Chen*,
Yunke Ao*,
Florian Tschopp,
Andrei Cramariuc,
Michel Breyer,
Jen Jen Chung,
Roland Siegwart,
Cesar Cadena
Conference on Robot Learning (CoRL), 2020
(*: equal contribution)
arxiv •
spotlight talk •
supp video •
code •
bibtex
Projects
 Transition From Model-Based to Model-Free Actor-Critic Reinforcement Learning
Transition From Model-Based to Model-Free Actor-Critic Reinforcement Learning
Le Chen,
Yunke Ao,
Kaiyue Shen,
Zheyu Ye,
Course Project in Deep Learning, 2020
report •
code
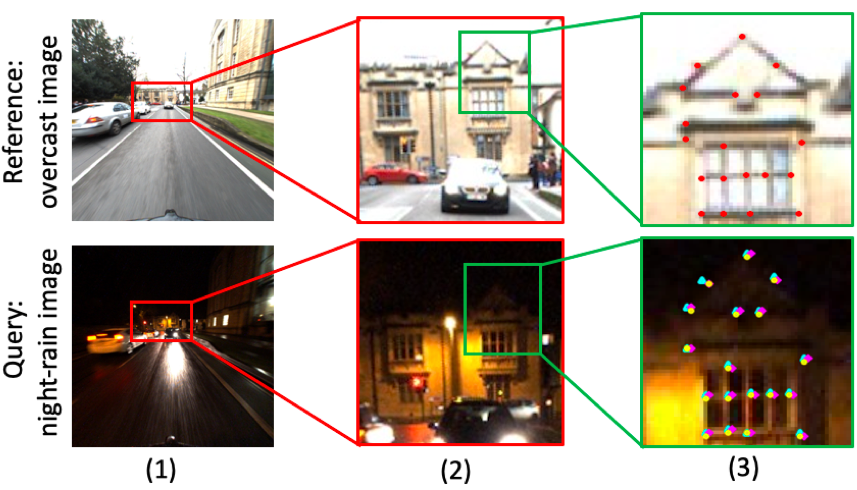 Leveraging Pixel Correspondences for Sparse-to-Dense Feature-Metric Localization
Leveraging Pixel Correspondences for Sparse-to-Dense Feature-Metric Localization
Le Chen,
Lixin Xue,
Zimeng Jiang
Course Project in 3D Vision, 2020
report •
code