Picture taken in Sagrada Familia
陳樂
I am a Computer Science PhD student at the Empirical Inference department of Max Planck Institute for Intelligent Systems and ETH Zurich, advised by Prof. Bernhard Schölkopf and Prof. Dieter Büchler. Previously, I obtained my M.S. in Electrical Engineering and Information Technology at ETH Zurich. I also spent time at Microsoft Mixed Reality & AI Lab in Zurich, Tencent AI Lab and Tencent Robotics X Lab.
My research focuses on building general agents and robots that can robustly perform a wide range of tasks. I am currently working on (1) dexterous manipulation with tactile sensing and (2) safe, compositional adaptation of foundation behavior models.
Research
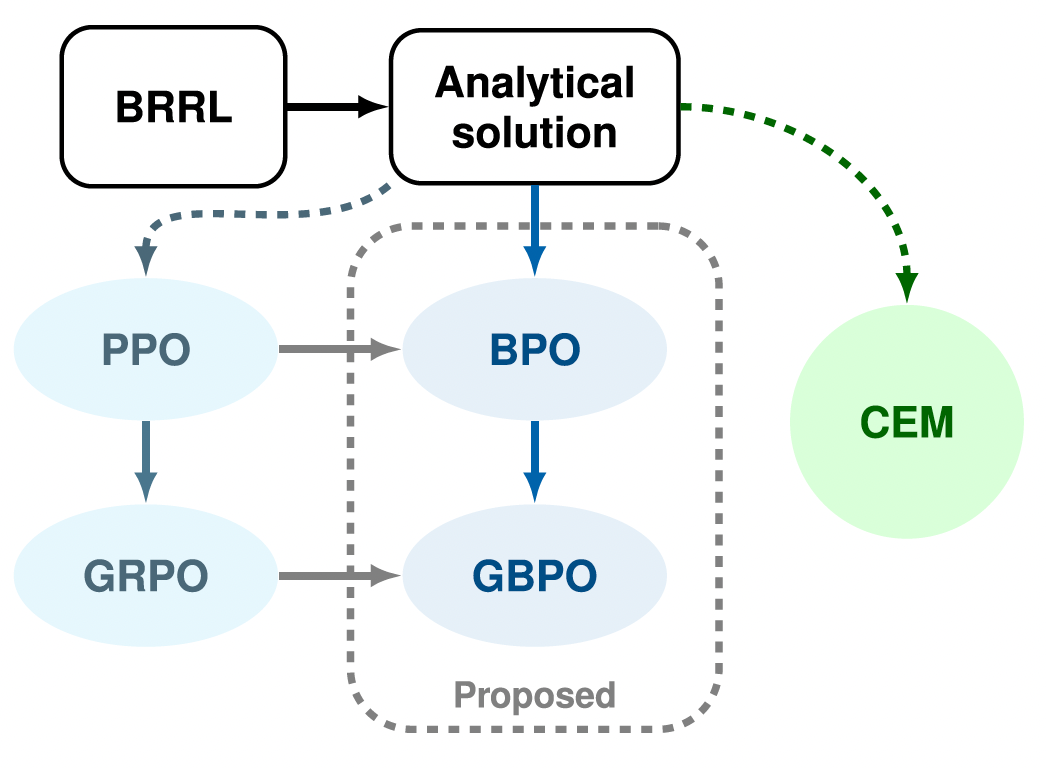
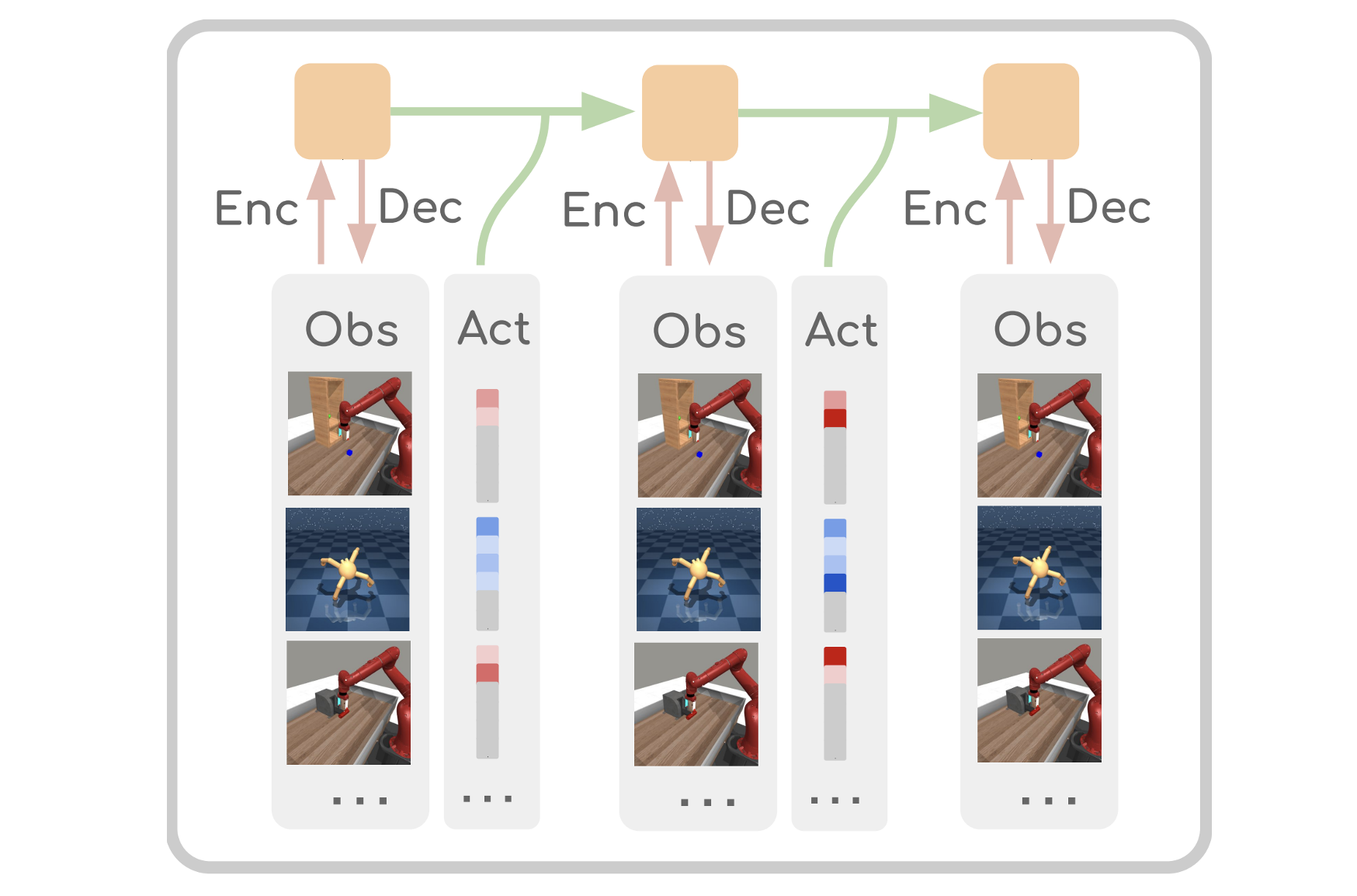
Efficient Reinforcement Learning by Guiding Generalist World Models with Non-Curated Data
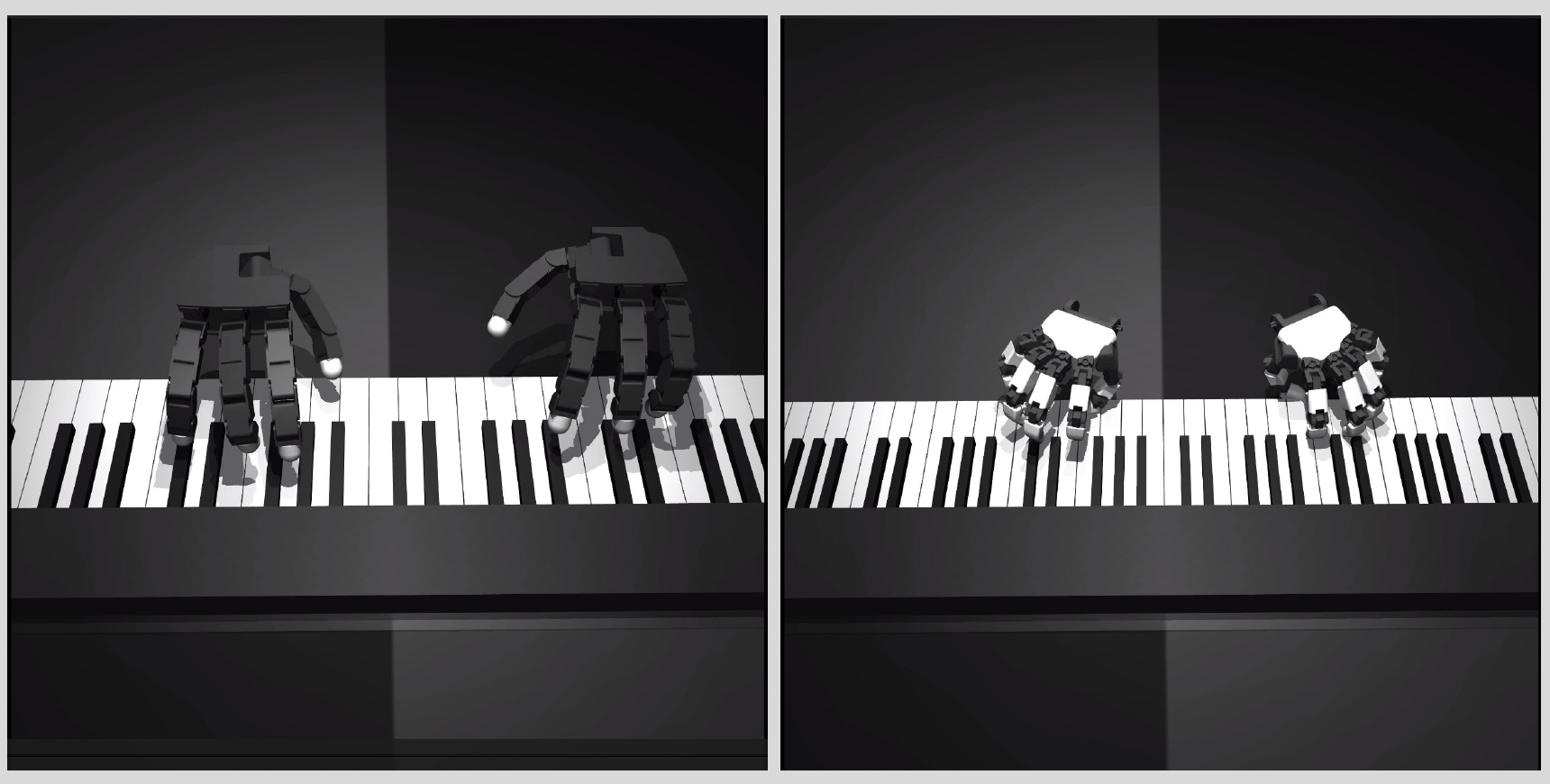
Dexterous Robotic Piano Playing at Scale
Under Review, 2025
(*: equal contribution)

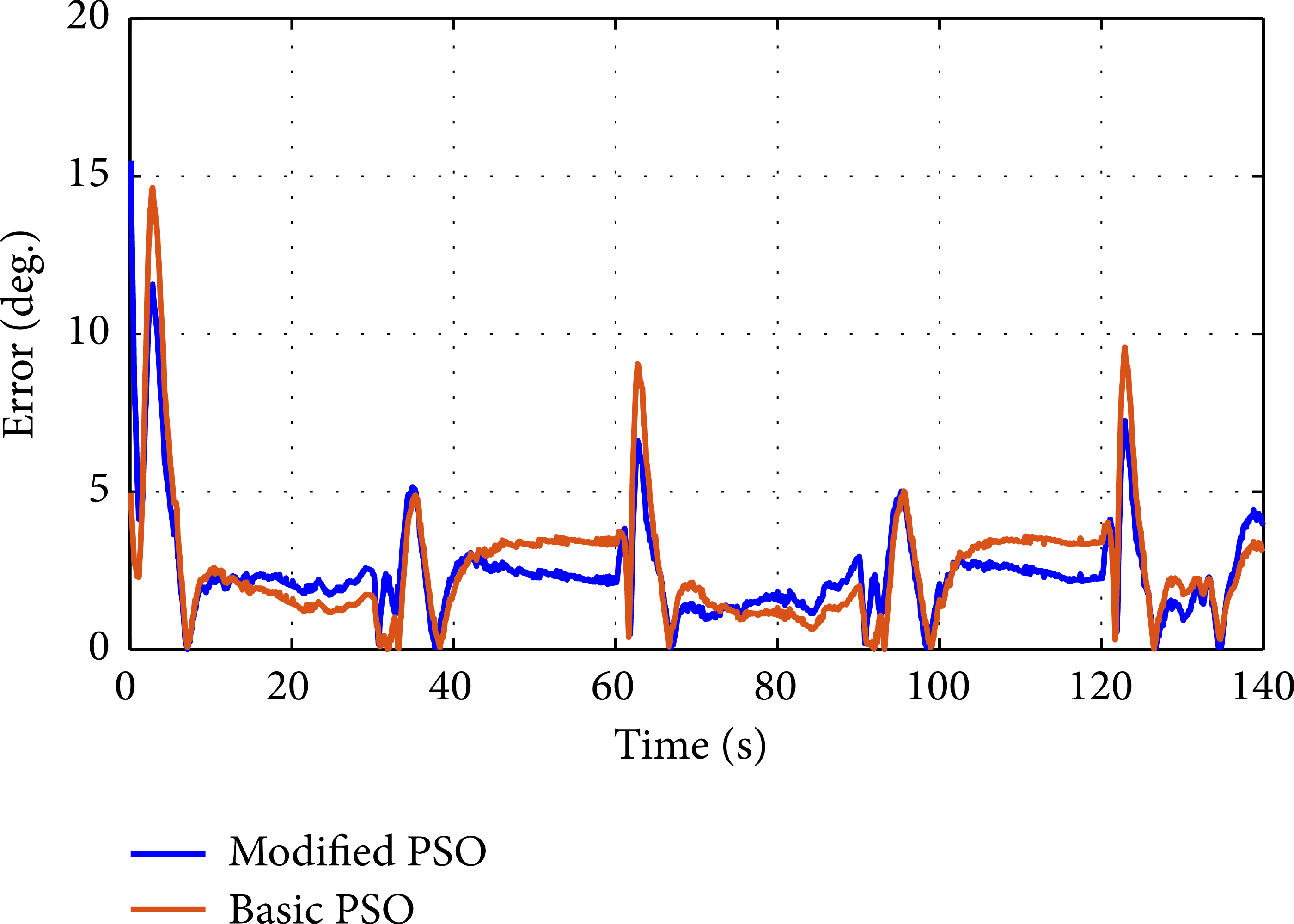
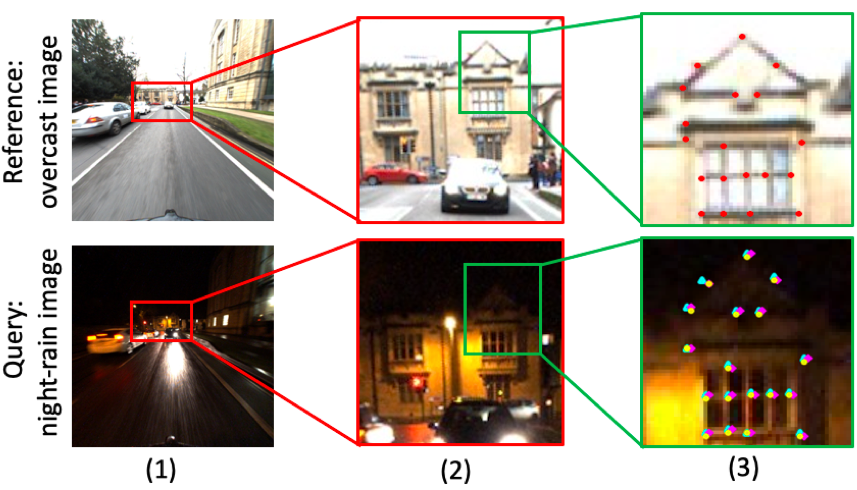
Unified Data Collection for Visual-Inertial Calibration via Deep Reinforcement Learning
(*: equal contribution)
Learning Trajectories for Visual-Inertial System Calibration via Model-based Heuristic Deep Reinforcement Learning
(*: equal contribution)